您好,歡迎訪問杭州冠航建筑起重機械設備網(wǎng)!
與時俱進,誠贏客戶
冠航機械七年堅持專注于建筑工程起重機械設備制造與銷售服務
全國服務熱線0571-88566309
全國服務熱線0571-88566309
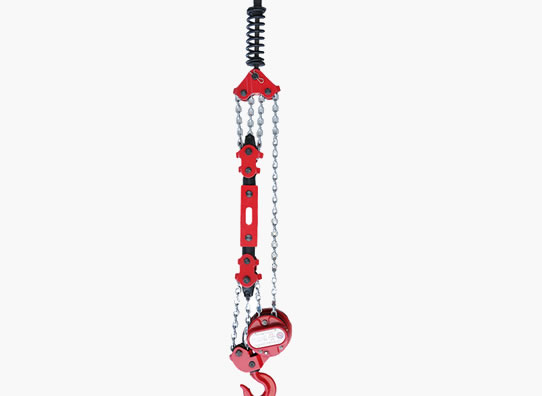
爬架電動葫蘆的提升原理,本質上與爬架網(wǎng)的提升原理一致,即借助與建筑結構相連的電動葫蘆,將外腳手架整體逐層向上提升。整個外架猶如高層建筑外圍的一圈活動吊籃,能夠隨施工進度靈活爬升,既保證了作業(yè)安全,又提高了施工效率。
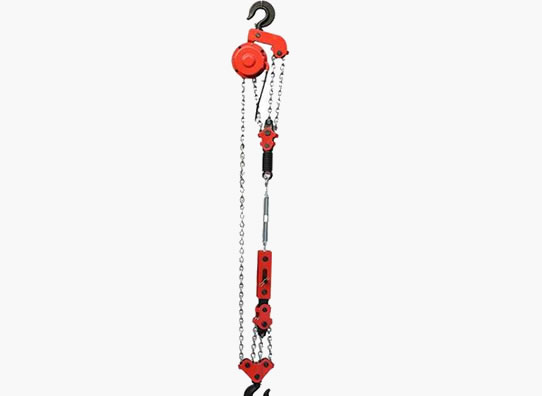
通常情況下,腳手架搭設高度為四層半。架體的最底部是整個結構的承力桁架,它承擔著上部架體傳遞下來的全部荷載,并將這些受力可靠地傳遞給底部的承力托。當爬架處于固定狀態(tài)時,承力托通過斜拉桿和穿墻螺桿,將荷載傳遞給建筑結構,確保架體穩(wěn)定、安全。而當爬架需要提升時,承力托的受力路徑發(fā)生變化——荷載經由電動葫蘆、承力鋼梁、提升拉桿及穿墻螺桿,同樣傳遞給建筑結構,從而實現(xiàn)整體的平穩(wěn)上升。

在具體操作中,爬架電動葫蘆懸掛于提升鋼梁上,提升鋼梁則通過提升拉桿和穿墻連接螺栓牢固地固定在建筑物上。電動葫蘆啟動后,整體提升承力托,從而帶動爬架向上移動。與此同時,導向輪和導向桿協(xié)同工作,有效防止外架在上升過程中發(fā)生傾斜,并起到垂直升降導向的作用,確保提升過程平穩(wěn)、準確。
正是這一套科學合理的受力轉換與導向系統(tǒng),使得爬架電動葫蘆能夠在高層建筑施工中安全、高效地完成逐層提升的任務。